








激光划线机通信接口(EtherCAT_Modbus)集成案例
来源:博特精密发布时间:2025-11-12 07:40:00
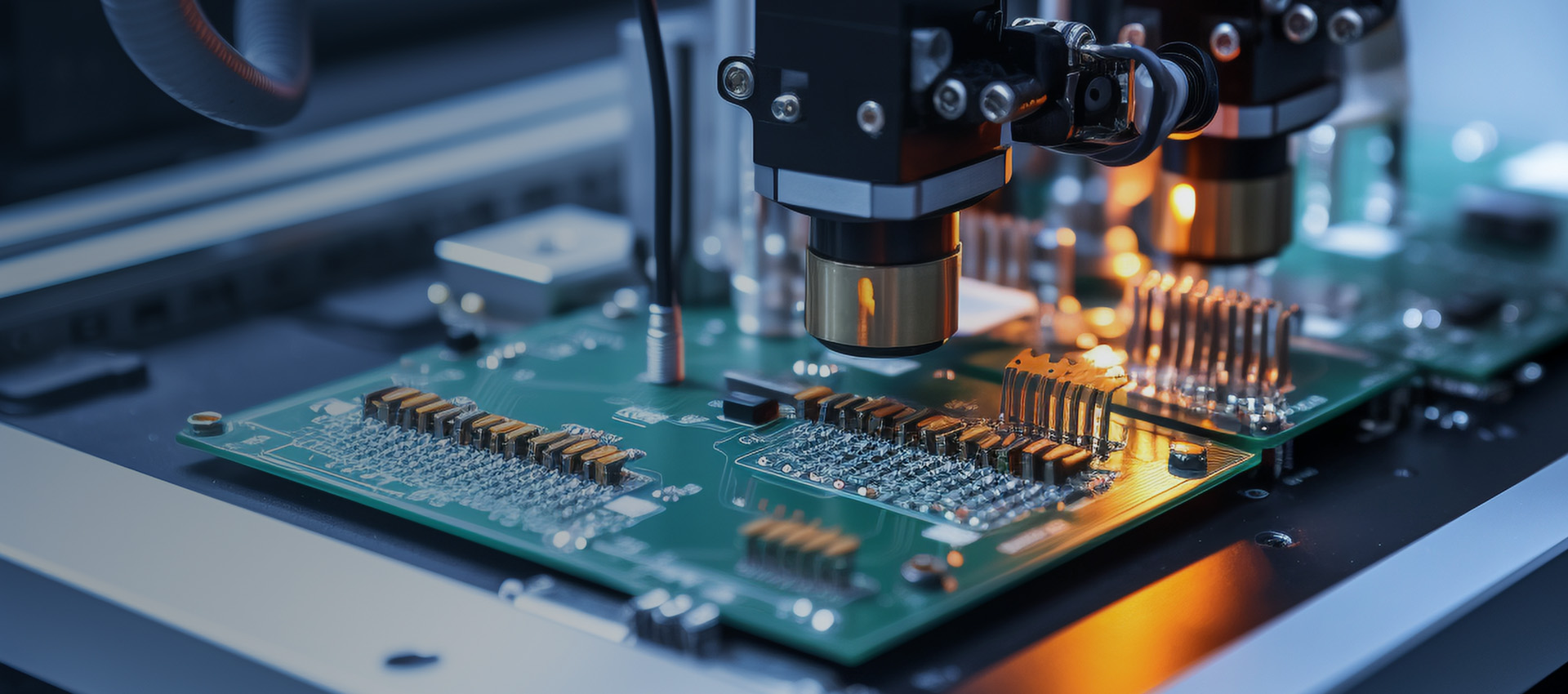
激光划线机作为现代工业自动化中的关键设备,广泛应用于汽车制造、电子元件加工和医疗器械生产等领域,用于高精度标记、切割和雕刻。随着工业4.0和智能制造的推进,激光划线机的高效集成与通信接口的优化成为提升生产线效率的关键因素。通信接口如EtherCAT和Modbus,作为工业网络协议,能够实现设备间的无缝数据交换和实时控制,从而降低人工干预、提高生产精度和灵活性。
本文将通过一个实际集成案例,详细分析激光划线机如何通过EtherCAT和Modbus接口实现系统集成,并探讨其在工业环境中的优势与挑战。该案例基于一家中型制造企业的实际项目,旨在通过集成优化生产流程,实现远程监控和自动化控制。
背景:EtherCAT与Modbus协议概述
彩运网cy123EtherCAT(以太网控制自动化技术)是一种高性能的工业以太网协议,专为实时控制应用设计。它采用主从架构,主站设备(如PLC)通过以太网帧直接控制多个从站设备(如激光划线机),实现微秒级的响应时间和高带宽数据传输。EtherCAT的优势在于其低延迟和高同步性,适用于需要精确运动控制和高速数据交换的场景,例如激光划线中的轨迹跟踪和实时参数调整。
Modbus则是一种广泛应用于工业自动化的串行通信协议,支持多种物理层(如RS-485、TCP/IP)。它采用主从模式,结构简单、易于实现,常用于数据采集和设备监控。Modbus协议包括ModbusRTU(用于串行通信)和ModbusTCP(用于以太网),适用于非实时或中等实时性要求的应用,例如读取激光划线机的状态数据或设置基本参数。
在激光划线机集成中,EtherCAT常用于处理高精度的运动控制和实时反馈,而Modbus则用于辅助功能,如温度监控或日志记录。这两种协议的结合,可以充分发挥各自优势,构建一个高效、可靠的工业通信网络。
彩运网cy123案例描述:激光划线机通信接口集成实践
项目背景与目标
本案例涉及一家专注于汽车零部件制造的企業,其生产线需要将多台激光划线机集成到现有的自动化系统中。原有系统采用传统PLC控制,但存在通信延迟高、数据同步性差的问题,导致划线精度不足和生产效率低下。项目目标是通过集成EtherCAT和Modbus接口,实现以下功能:
-实时控制激光划线机的运动轨迹和功率参数,确保划线精度在±0.1mm以内。
-远程监控设备状态(如温度、故障代码),并通过Modbus传输数据到上位机系统。
彩运网cy123-减少系统集成成本,提高生产线的灵活性和可扩展性。
集成步骤与过程
步骤1:需求分析与协议选择
彩运网cy123首先,团队分析了生产线的通信需求:高实时性控制(如激光开关和位置调整)由EtherCAT处理,而非实时数据(如设备运行日志和环境参数)通过ModbusTCP实现。选择EtherCAT作为主控制协议,因其支持分布式时钟和高速数据交换;Modbus则用于与现有SCADA(监控与数据采集系统)集成,降低改造复杂度。
步骤2:硬件配置与网络拓扑设计
硬件方面,采用了支持EtherCAT的激光划线机(内置EtherCAT从站接口)和一台EtherCAT主站控制器(如BeckhoffPLC)。同时,通过ModbusTCP网关将激光划线机连接到企业局域网,实现与SCADA系统的通信。网络拓扑采用星型结构,EtherCAT网络独立运行以确保实时性,Modbus网络则通过交换机与企业网络集成,避免干扰。
彩运网cy123步骤3:软件配置与驱动开发
在软件层面,使用TwinCAT(基于EtherCAT的自动化软件)配置主站控制器,定义设备参数和通信周期(设置为1ms以满足实时需求)。对于Modbus集成,编写了自定义驱动程序,将激光划线机的状态数据(如温度、错误代码)映射到Modbus寄存器,并通过Python脚本实现数据解析和上传到SCADA系统。集成过程中,团队还优化了EtherCAT的分布式时钟同步,确保多台设备间的动作一致性。
步骤4:测试与优化
测试阶段包括功能测试和性能验证:通过模拟生产线运行,检查EtherCAT的响应延迟(实测低于100μs)和Modbus的数据传输可靠性。遇到的主要挑战包括EtherCAT网络抖动导致的划线偏差,以及ModbusTCP在高峰负载下的数据丢失。解决方案包括调整网络参数(如减少EtherCAT帧大小)和增加Modbus重试机制。最终,系统实现了99.9%的通信成功率,划线精度提升至设计要求。
挑战与解决方案
彩运网cy123-协议兼容性问题:原有设备仅支持Modbus,而新激光划线机需集成EtherCAT。通过使用多协议网关设备,实现了EtherCAT和Modbus的桥接,避免了硬件更换成本。
彩运网cy123-实时性不足:初期测试中,EtherCAT网络因负载过高出现延迟。优化网络拓扑,采用优先级调度和冗余设计,确保关键数据优先传输。
彩运网cy123-故障诊断复杂:集成后系统故障难以定位。引入诊断工具,如Wireshark抓包分析,并结合Modbus的故障代码反馈,简化了维护流程。
结果与效益
通过EtherCAT和Modbus的集成,该企业的激光划线机系统实现了显著改进:生产效率提升约20%,因通信延迟减少,设备停机时间降低15%。实时控制使划线精度稳定在±0.1mm内,同时Modbus集成实现了远程监控和预测性维护,减少了人工巡检成本。此外,系统的模块化设计支持未来扩展,例如添加更多设备或升级到更高速的协议。这一案例证明,合理选择通信接口可以大幅提升工业自动化的整体效能。
常见问题解答(FAQ)
彩运网cy1231.问:EtherCAT和Modbus在激光划线机集成中的主要区别是什么?
答:EtherCAT是一种高速实时以太网协议,适用于需要微秒级响应的应用,如激光划线机的运动控制和精确轨迹跟踪;而Modbus是一种简单、通用的串行或TCP/IP协议,更适合非实时数据采集,如设备状态监控和参数设置。在集成中,EtherCAT处理核心控制任务,Modbus用于辅助功能,两者互补可提高系统灵活性。
2.问:如何根据应用需求选择EtherCAT或Modbus接口?
答:选择取决于实时性、数据量和成本因素。如果应用需要高精度、低延迟控制(如激光划线中的实时调整),优先选择EtherCAT;对于简单数据交换或与旧系统集成(如监控温度日志),Modbus更经济高效。在实际项目中,常结合使用,以平衡性能与成本。
彩运网cy1233.问:集成EtherCAT和Modbus时,常见的兼容性问题有哪些?如何解决?
答:常见问题包括协议不匹配、网络冲突和硬件限制。例如,EtherCAT设备可能无法直接与Modbus网络通信。解决方案包括使用多协议网关或转换器进行桥接,优化网络分段以避免干扰,并在软件层实现数据映射。测试阶段应进行充分兼容性验证,以确保稳定运行。
彩运网cy1234.问:EtherCAT集成是否需要特殊的硬件支持?成本如何?
彩运网cy123答:是的,EtherCAT集成需要支持EtherCAT协议的硬件,如专用主站控制器和从站设备(激光划线机需内置EtherCAT接口)。成本相对较高,但由于其高性能,可减少整体系统复杂性和长期维护费用。相比之下,Modbus硬件更普及且成本较低,适合预算有限的场景。
5.问:Modbus协议能否用于激光划线机的实时控制?为什么?
彩运网cy123答:一般不推荐,因为Modbus的通信速率较低且缺乏硬实时机制,可能导致毫秒级延迟,无法满足激光划线高精度应用的实时需求。Modbus更适合非实时任务,如数据记录或报警处理。如果必须使用,可结合其他协议(如EtherCAT)或优化网络以减少延迟,但性能可能受限。
总结
彩运网cy123本案例展示了激光划线机通过EtherCAT和Modbus通信接口集成的实际应用,突出了协议选择、硬件配置和软件优化在工业自动化中的重要性。这种集成不仅提升了生产效率和精度,还为未来智能化升级奠定了基础。企业可根据自身需求,参考本案例灵活调整集成策略,以实现最佳性能。如果您有更多疑问,欢迎进一步探讨工业通信解决方案。
下一篇:液晶划线机多治具平台协作方案
推荐新闻
-
小型激光切割机行业应用案例
小型激光切割机作为一种高效、精密的加工工具,近年来在多个行业中得到了广泛应用。它利用高能量...
2025-10-06 -
在线流水线CCD视觉激光打标机:技术参数与选型指南
彩运网cy123在工业自动化飞速发展的今天,在线流水线CCD视觉激光打标机已成为现代智能工厂不可或缺的加工设...
2025-10-09 -
指纹芯片硅晶圆热损伤:热影响区HAZ降低芯片电性能
在智能设备日益普及的今天,指纹识别芯片作为核心的生物识别组件,广泛应用于手机、门禁、金融支...
2025-09-16 -
电子连接器行业CCD视觉打标精度提升方案
彩运网cy123一根Pin针弯曲0.015mm,肉眼难辨,传统2D视觉系统也难以察觉,却导致整批连接器焊接不良,最终赔...
2025-09-23 -
火眼金睛:全面识别劣质激光切割机方法
激光切割机作为现代制造业的核心设备之一,其质量直接关系到生产效率、加工精度和长期使用成本。...
2025-10-06 -
小型精密激光切割机解决方案指南
小型精密激光切割机是一种高效、高精度的加工设备,利用激光束对材料进行精细切割、雕刻或打标。...
2025-10-06 -
激光切割安全操作实操手册
激光切割技术以其高精度、高效率广泛应用于金属加工、制造业等领域。然而,激光设备在操作过程中...
2025-10-06 -
激光切割实操性能评测报告
彩运网cy123激光切割设备实操性能评测报告报告编号:LC-EVAL-2025-101全面评估特定型号激光切割机在实际生产...
2025-10-06
